Research
You can find a short description and extra material of each paper by clicking on the title.
2022
 |
A Feasibility-Driven Approach to Control-Limited DDP. C. Mastalli, W. Merkt, J. Marti-Saumell, H. Ferrolho, J. Sola, N. Mansard, and S. Vijayakumar.
Autonomous Robots (AuRo), 2022 |
2021
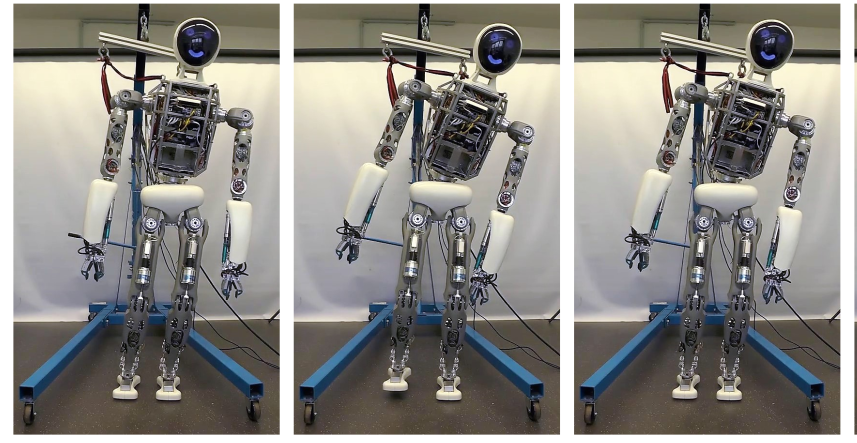 |
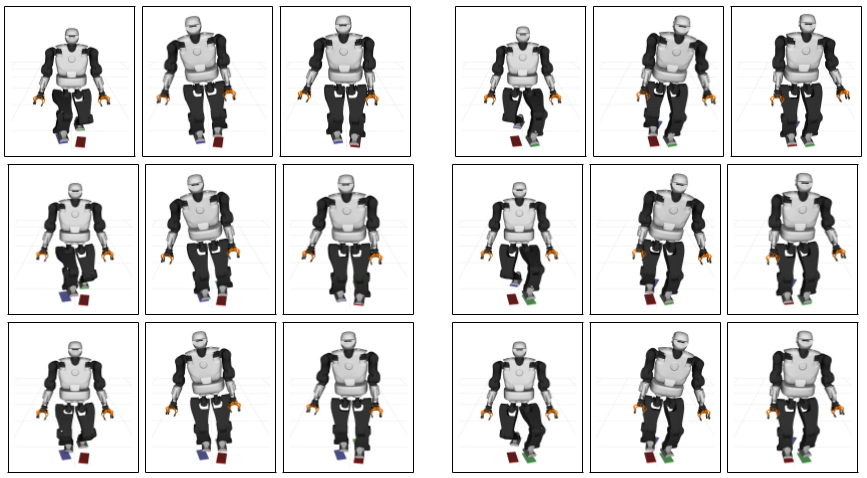
Design, analysis and control of the series-parallel hybrid RH5 humanoid robot. J. Esser, S. Kumar, H. Peters, V. Bargsten, J. de Gea Fernandez, C. Mastalli, O. Stasse, and F. Kirchner.
IEEE-RAS International Conference on Humanoid Robots (ICHR), 2021 |
2020
 |
Motion Planning for Quadrupedal Locomotion: Coupled Planning, Terrain Mapping and Whole-Body Control.
C. Mastalli, M. Focchi, I. Havoutis, D. G. Caldwell and C. Semini
IEEE Transactions on Robotics (T-RO), 2020 |
 |
Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control.
C. Mastalli, R. Budhiraja, W. Merkt, G. Saurel, B. Hammoud, M. Naveau, J. Carpentier, L. Righetti, S. Vijayakumar and N. Mansard
IEEE International Conference on Robotics and Automation (ICRA), 2020 |
 |
Learning How to Walk: Warm-starting Optimal Control Solver with Memory of Motion.
T. Lembono, C. Mastalli, P. Fernbach, N. Mansard and S. Calinon
IEEE International Conference on Robotics and Automation (ICRA), 2020 |
 |
Automatic Gait Pattern Selection for Legged Robots.
J. Wang, I. Chatzinikolaidis, C. Mastalli, W. Wolfslag, G. Xin, S. Tonneau and S. Vijayakumar
IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 |
 |
Squash-Box Feasibility Driven Differential Dynamic Programming.
J. Marti-Saumell, J. Solà, C. Mastalli and A. Santamaria-Navarro
IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 |
 |
Motion Planning with Multi-Contact and Visual Servoing on Humanoid Robots.
K. Giraud-Esclasse, P. Fernbach, G. Buondonno, C. Mastalli and O. Stasse
International Symposium on System Integration (SII), 2020 |
2019
 |
Passive Whole-body Control for Quadruped Robots: Experimental Validation over Challenging Terrain.
S. Fahmi†, C. Mastalli†, M. Focchi, D. G. Caldwell and C. Semini
IEEE Robotics and Automation Letters (RA-L), 2019 |
2018
 |
Heuristic Planning for Rough Terrain Locomotion in Presence of External Disturbances and Variable Perception Quality.
M. Focchi, R. Orsolino, M. Camurri, V. Barasuol, C. Mastalli, D. G. Caldwell and C. Semini
Springer Tracts in Advanced Robotics (STAR), 2018 |
 |
Application of Wrench based Feasibility Analysis to the Online Trajectory Optimization of Legged Robots.
R. Orsolino, M. Focchi, C. Mastalli, H. Dai, D. G. Caldwell and C. Semini
IEEE Robotics and Automation Letters (RA-L), 2018 |
 |
Differential Dynamic Programming for Multi-Phase Rigid Contact Dynamics.
R. Budhiraja, J. Carpentier, C. Mastalli and N. Mansard
IEEE-RAS International Conference on Humanoid Robots (ICHR), 2018 |
2017
 |
Simultaneous Contact, Gait and Motion Planning for Robust Multi-Legged Locomotion via Mixed-Integer Convex Optimization.
B. Aceituno, C. Mastalli, H. Dai, M. Focchi, A. Radulescu, D. G. Caldwell, J. Cappelletto, J. C. Grieco, G. Fernandez and C. Semini
IEEE Robotics and Automation Letters (RA-L), 2017 |
 |
Trajectory and Foothold Optimization using Low-Dimensional Models for Rough Terrain Locomotion.
C. Mastalli, M. Focchi, I. Havoutis, A. Radulescu, S. Calinon, J. Buchli, D. G. Caldwell and C. Semini
IEEE International Conference on Robotics and Automation (ICRA), 2017 |
 |
Bio-inspired holistic control through modular relative Jacobian for combined four-arm robots. R. Jamisola and C. Mastalli.
International Conference on Advanced Robotics (ICAR), 2017 |
2016
 |
Hierarchical Planning of Dynamic Movements without Scheduled Contact Sequences. C. Mastalli, I. Havoutis, M. Focchi, D. Caldwell and C. Semini.
IEEE International Conference on Robotics and Automation (ICRA), 2016 |
2015
 |
Planning and Execution of Dynamic Whole-Body Locomotion for a Hydraulic Quadruped on Challenging Terrain. A. W. Winkler, C. Mastalli, I. Havoutis, M. Focchi, D. Caldwell and C. Semini.
IEEE International Conference on Robotics and Automation (ICRA), 2015 |
 |
On-line and on-board planning and perception for quadrupedal locomotion. C. Mastalli, A. W. Winkler, I. Havoutis, M. Focchi, D. Caldwell and C. Semini.
IEEE International Conference on Technologies for Practical Robot Applications (TePRA), 2015 |
2014
 |
A Proposed Architecture for Autonomous Operations in Backhoe Machines. C. Mastalli and G. Fernández-López.
International Conference on Intelligent Autonomous Systems (IAS-13), 2014 |
 |
Extracting Points Features from Laser Rangefinder Data based on Hough Transform. N. Certad, C. Mastalli, J. Cappelletto and J.C. Grieco.
IEEE ANDESCON, 2014 |
PhD Thesis
| |
Planning and Execution of Dynamic Whole-Body Locomotion on Challenging Terrain.
C. Mastalli
Istituto Italiano di Tecnologia |
Master Thesis
| |
Learning from Demonstration using Dynamic Movement Primitives in Excavator Robots.
C. Mastalli
Simón Bolívar University |