Squash-Box Feasibility Driven Differential Dynamic Programming (IROS)
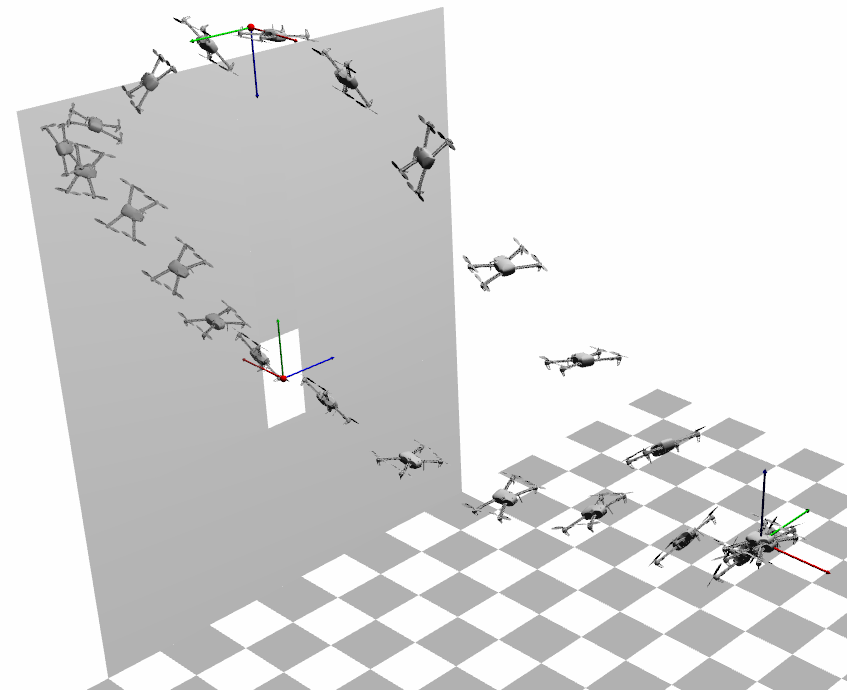
Recently, Differential Dynamic Programming (DDP) and other similar algorithms have become the solvers of choice when performing non-linear Model Predictive Control (nMPC) with modern robotic devices. The reason is that they have a lower computational cost per iteration when compared with off-the-shelf Non-Linear Programming (NLP) solvers, which enables its online operation. However, they cannot handle constraints, and are known to have poor convergence capabilities. In this paper, we propose a method to solve the optimal control problem with control bounds through a squashing function (i.e., a sigmoid, which is bounded by construction). It has been shown that a naive use of squashing functions damage the convergence rate. To tackle this, we first propose to add a quadratic barrier that avoids the difficulty of the plateau produced by the sigmoid. Second, we add an outer loop that adapts both the sigmoid and the barrier; it makes the optimal control problem with the squashing function converge to the original control-bounded problem. To validate our method, we present simulation results for different types of platforms including a multi-rotor, a biped, a quadruped and a humanoid robot.