Passive Whole-body Control for Quadruped Robots: Experimental Validation over Challenging Terrain (RA-L)
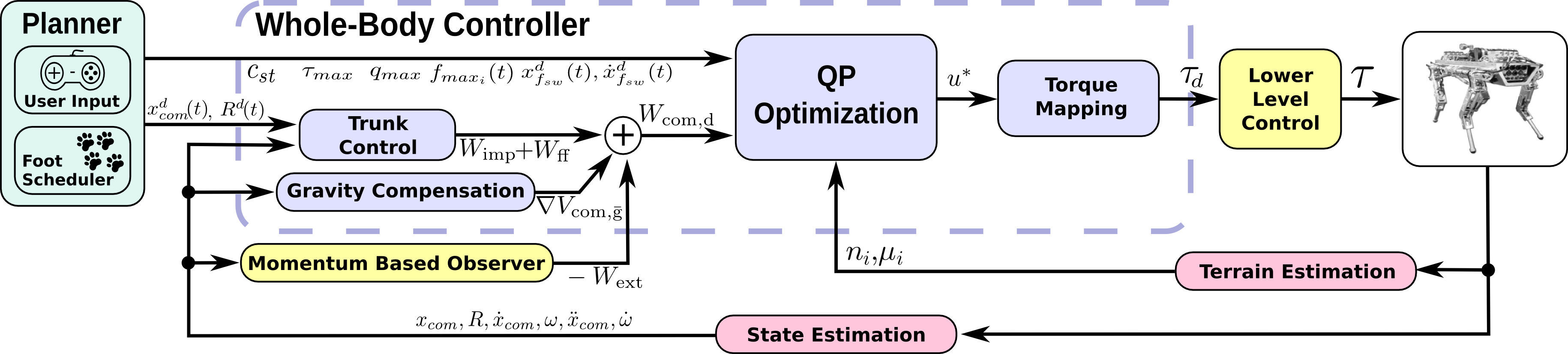
We present experimental results using a passive whole-body control approach for quadruped robots that achieves dynamic locomotion while compliantly balancing the robot’s trunk. We formulate the motion tracking as a Quadratic Program(QP) that takes into account the full robot rigid body dynamics,the actuation limits, the joint limits and the contact interaction. We analyze the controller’s robustness against inaccurate friction coefficient estimates and unstable footholds, as well as its capability to redistribute the load as a consequence of enforcing actuation limits. Additionally, we present practical implementation details gained from the experience with the real platform. Extensive experimental trials on the 90 kg Hydraulically actuated Quadruped(HyQ) robot validate the capabilities of this controller under various terrain conditions and gaits. The proposed approach is superior for accurate execution of highly dynamic motions with respect to the current state of the art.