Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control (ICRA)
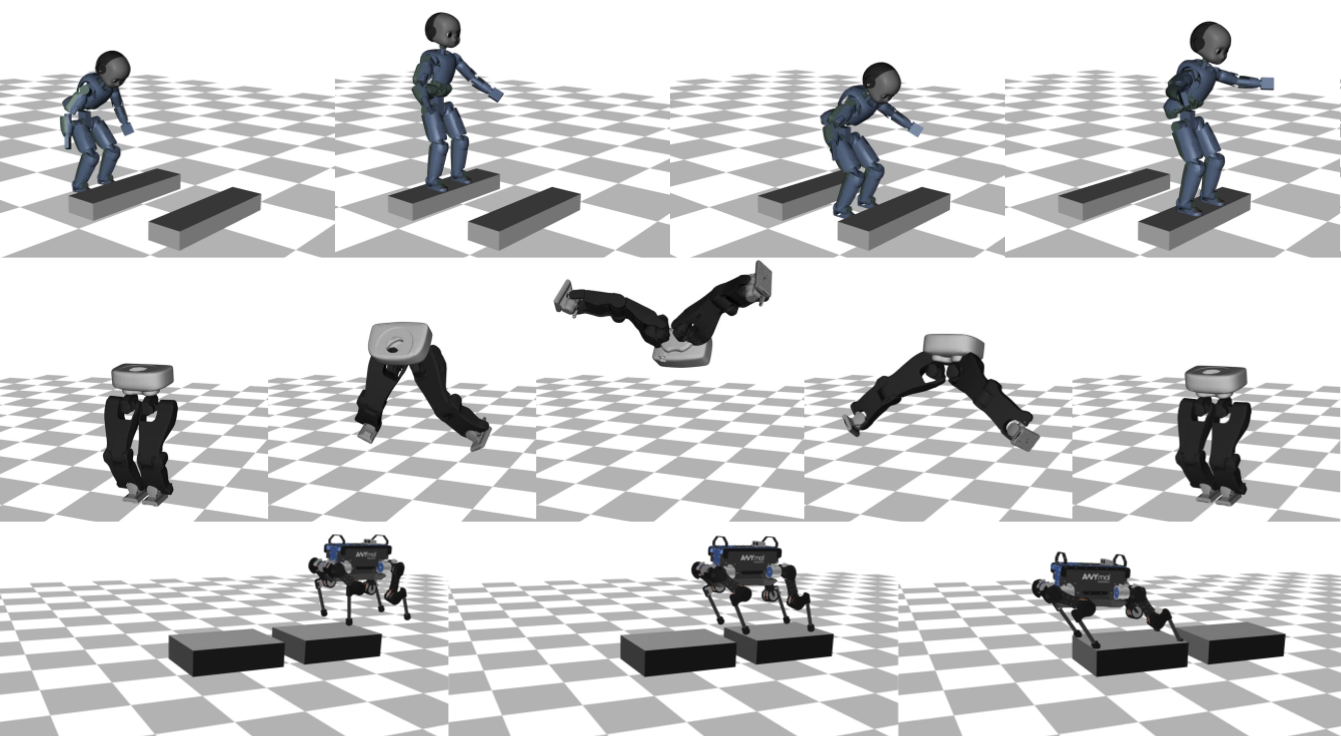
We introduce Crocoddyl (Contact RObot COntrol by Differential DYnamic Library), an open-source framework tailored for efficient multi-contact optimal control. Crocoddyl efficiently computes the state trajectory and the control policy for a given predefined sequence of contacts. Its efficiency is due to the use of sparse analytical derivatives, exploitation of the problem structure, and data sharing. It employs differential geometry to properly describe the state of any geometrical system, e.g. floating-base systems. Additionally, we propose a novel multiple-shooting method called Feasibility-prone Differential Dynamic Programming (FDDP). However, our method does not add extra decision variables which often increases the computation time per iteration due to factorization. Our novel method shows a greater globalization strategy compared to classical Differential Dynamic Programming (DDP) algorithms. Concretely, we propose two modifications to the classical DDP algorithm. First, the backward pass accepts infeasible state-control trajectories. Second, the rollout keeps the gaps open during the early “exploratory” iterations (as expected in multiple-shooting methods with only equality constraints). We showcase the performance of our framework using different tasks. With our method, we can compute highly-dynamic maneuvers for legged robots (e.g. jumping, front-flip) in the order of milliseconds.

You can find the video of this presentation in https://youtu.be/nTeiHioEO4w.